|
[식물공장과 전기전자정보기술 ③]
식물공장을 움직이는 로봇기술
시설원예작물은 벼, 보리와 같은 토지 이용형 작물에 비해 수확량당 단가가 높고 수익성이 높은 반면, 재배작업의 대부분이 수작업이기 때문에 막대한 노동력을 필요로 하고 있다. 최근 일본에서는 시설원예의 대규모화가 진행되고 있어 재배작업의 자동화 및 생력화의 필요성이 점차 고조되고 있다. 특히, 토마토의 경우에는 네덜란드의 대형 하우스와 같은 형태로 재배면적이 증가하고 있다. 고도의 환경제어장치가 도입된 재배시설을 식물공장이라고 하는데 그중 시설에 태양광을 투과시키는 재배시설을 태양광 이용형 식물공장이라고 부르고 있다. 본고에서는 토마토를 생산하는 태양광 이용형 식물공장에 있어서 ▲관행의 재배방법 ▲생력화가 필요한 작업 ▲농업·식품산업기술종합연구기구(이하, 농연기구)가 개발한 식물공장용 로봇을 소개한다. 또한, 식물공장용 로봇의 실용화를 목표로 한 미래의 전기공학분야 등 새로운 기술도입이 기대되는 분야에 대해 설명한다.
정리 편집부
식물공장에서의 토마토 재배 작업현황
저단재배와 장단재배
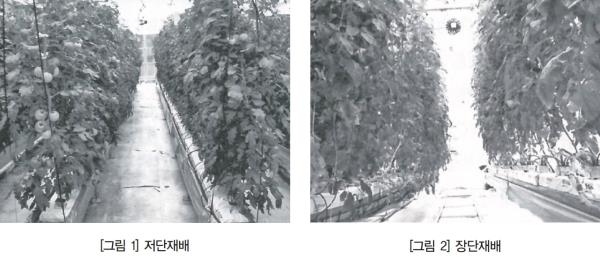
토마토의 재배는 통상 곁눈(측지, 곁가지)을 따서 제거하고 주간(主幹: 근본을 이루는 중심 줄기로, 가장 굵은 원줄기) 1개만을 신장시킨다. 식물공장에서 재배되는 토마토의 재배방법은 1기작의 재배기간에 따라 크게 저단재배([그림 1] 참조)와 장단재배([그림 2] 참조)로 나뉘며 양쪽 모두 연중 재배된다. 저단(低段), 장단(長段)의 “단(段)”이란 과방(果房, 과실 송이)을 세는 단위로 사용되고 있다. 과방이란 과실의 송이를 뜻한다. 토마토는 포도와 같이 송이 모양으로 과실이 착과되며, 관행에서는 과방에서 숙성된 열매를 1개 1개 수확한다. 저단재배는 1~3송이의 과방을 착과시켜 3, 4개월 정도의 단기간에 재배를 종료시킨다. 수확이 끝난 후에는 다음 재배의 모종을 정식(定植)한다. 저단밀식재배는 연간 3~5회 정도 재배를 실시한다. 한편, 장단재배는 10단 이상의 과방을 수확하기 위해 9~10개월 이상의 장기간에 걸쳐 재배를 실시한다. 일본의 식물공장에서는 저단재배, 장단재배 모두 실시되고 있지만 장단재배 쪽이 더 많다.
 작업내용 농연기구 쓰쿠바 식물공장 실증거점에서는 연구 및 연수를 목적으로 저단과 장단 양측의 재배를 실시하고 있다. 쓰쿠바 실증거점에서의 작업을 예로 들어 저단· 장단재배에 필요한 작업들을 소개한다. 토마토를 재배하기 위해 먼저 흙으로 채운 셀 트레이에 종자를 뿌리고 발아장치로 발아시킨다. 발아한 모종은 트레이별로 폐쇄형 육묘장치 안에서 인공조명과 자동관수(自動灌水)에 의해 육묘(育苗)된다. 육묘된 모종은 어느 정도 커지면 셀 트레이에서 뿌리째 뽑혀 암면 큐브에 이식된다. 암면 큐브의 모종은 더욱 크게 육묘된 후 암면 슬래브상에 두고 정식한다. 정식 후 주지(主枝)의 신장에 따라 곁눈이 발생하므로 눈따기를 실시하고 정기적으로 불필요한 측지를 제거한다. 주지가 신장되면 작물체(作物體)는 자립하지 못하고 쓰러져버리기 때문에 유인끈과 유인클립으로 유인한다. 유인(誘引)이란 식물체가 쓰러지지 않도록 끈이나 막대기 등에 줄기를 고정시키는 것을 말한다. 저단·장단재배 양측 모두 주지가 신장되는 한 정기적으로 눈따기 및 유인을 실시할 필요가 있다. 꽃이 개화하면 수분(受粉)을 실시하고 열매를 맺기 쉽게 하기 위해 꽃에 호르몬제를 분무기 등으로 분사해 착과처리를 실시한다.
저단재배의 경우 과방이 1~3단까지 착과되면 주지를 적심(摘心)한다. 즉 성장점을 절제함으로써 주지가 신장되지 않도록 한다. 그 후 아래쪽의 숙성된 과실부터 차례로 수확을 실시한다. 한편, 장단재배는 적심을 하지 않기 때문에 주지가 계속 신장하여 하우스의 천정 부근에까지 이른다. 성장점이 하우스의 처마 근처에까지 이르면 덩굴내리기라고 하는 주간(主幹) 선단의 성장점을 낮추는 작업을 실시한다. 덩굴내리기는 장단재배에서만 필요한 작업으로, 주지의 성장점을 통로 쪽 방향으로 겹치지 않도록 이동시키면서 내린다. 식물공장에서의 덩굴내리기는 일반적으로 고소작업차(高所作業車)를 타고 작업을 실시한다. 수확 시는 그루터기의 아래쪽에 착과하므로 고소작업차는 필요 없으며, 숙성된 과실부터 순차적으로 수확한다. 모든 과실을 다 수확하고 나면 그루터기를 암면 슬래브에서 뽑아 식물체와 암면 슬래브로 나누어 회수하고, 운반·폐기한다. 다음의 재배를 준비하기 위해 암면 슬래브의 배치 및 씨뿌리기 등을 실시한다.
자동화를 필요로 하는 작업 식물공장의 관행작업에서는 파종, 흙들어넣기, 관수 이외에는 대부분 자동화가 되어 있지 않다. 기계의 이용 면에서는 덩굴내리기나 눈따기, 유인작업에 고소작업차가 이용되고 있으며, 농약살포는 방제기에 의해 실시되고 있다. 그 외에는 수작업으로 이루어진다. 수확작업은 모든 작업 중에서도 시간이 가장 많이 소요되는 작업이다. 하우스 내의 고온다습한 작업환경에서 중노동의 수확 컨테이너 핸들링 작업도 수반되므로 자동화 및 생력화(간소화)가 요망되고 있다. 대규모의 식물공장에서는 많은 고용에 의해 수확을 실시하고 있기 때문에 노동비용의 절감을 위해서라도 자동화가 더욱 요망되고 있다. 수확작업 다음으로 시간이 많이 소요되는 작업은 ▲눈따기 ▲유인 ▲아랫잎(下葉) 따기 ▲덩굴내리기와 같은 생육관리작업이며, 각 생육관리작업의 시간을 합계하면 수확작업의 시간을 초과하는 경우도 있다.
토마토 과방 수확로봇
구조
수확작업은 식물공장의 토마토 재배에 있어서 개발 요구가 높고 개발되었을 때의 효과도 높다. 그리하여 농연기구에서는 수확로봇의 개발에 나섰다. 농연기구는 과방 수확로봇과 선택 수확로봇의 2기종을 개발하였는데 먼저 과방 수확로봇에 대해 소개한다.
과방 수확로봇([그림 3] 참조)은 저단재배에 대응하여 토마토를 과방째 수확하는 로봇이다. 일반적으로 1과방에 과실이 3~5개 정도 착과하여 숙성된 순으로 과방에서 과실을 하나하나 손으로 따거나 가위로 과경(과실이 착과하고 있는 축 부분)을 절단하여 수확하지만, 과방 수확로봇은 자동으로 과방째 수확한다. 한 번에 여러 개를 수확할 수 있기 때문에 선택 수확보다 높은 효율화가 기대된다. 또 모든 과실을 수확하고 과경의 절단 및 파지가 가능하기 때문에 로봇을 단순화하여 저코스트화를 도모할 수 있을 것으로 보인다. 과방 수확은 현재 미니토마토(방울토마토)나 방울토마토보다 조금 큰 나카타마(中玉) 토마토의 일부 품종에서는 가능하지만, 오다마(大玉) 토마토(왕방울 토마토)에서는 불가능하기 때문에 농연기구에서는 로봇개발과 아울러 품종육성 및 재배방법의 개발도 실시하고 있다. 과방 수확로봇은 주로 ▲시각시스템 ▲매니퓰레이터 ▲주행부(走行部)로 구성되어 있으며, 과방을 지지하는 축인 과경을 전용 프레임으로 지지하고, 과방이 같은 높이로 정렬되도록 하고 있다. 같은 높이에 맞춰 고정함으로써 수확로봇의 구조를 소형·단순화할 수 있게 되었다. 과경의 위치가 프레임에 의해 고정되어 있기 때문에 3차원 위치검출을 실시할 필요가 없으며, 프로토타입(시제품) 시스템에는 2차원 화상처리시스템이 사용되고 있다. 토마토 과실의 검출에는 색상, 채도, 명도의 각각에 역치를 설정하여 추출하고 있다. 과방 수확 상태의 토마토는 충분히 빨갛게 익어 있고 배경에 적색 부분이 없으며 태양광의 영향도 적기 때문에 과실 검출이 가능하다. 엔드 이펙터로 수확을 실시해 착색한 토마토 과실의 상부에 있는 과경을 검출하고 있다.매니퓰레이터는 전동 실린더를 조합한 3축 직교형이다. 엔드 이펙터는 날이 파지용 고무와 일체화된 구조로, 과경을 파지하면서 절단한다([그림 4] 참조). 엔드 이펙터를 매니퓰레이터로 접근시켜 과실을 수확하고 반송 컨베이어에 수확한 과실을 놓는다. 주행부는 시판되고 있는 반송로봇을 이용했다. 반송로봇은 자기테이프를 검출하여 자동주행하는 방식으로 통로를 주행한다. 일정거리의 주행 및 정지를 반복하여 수확적기의 과실을 검출하면 수확을 개시한다.
 
성능
주행 및 수확을 실시한 하우스 실험에서의 수확성공률은 77%였다. 수확에 실패한 경우는 과경이 고정용 프레임으로 확실하게 고정되지 않았을 경우에 발생했다.
향후 과제와 산업분야에 대한 기대
일반적으로 오다마 토마토의 품종과 재배방법에 있어서는 과실의 착과높이와 숙성도가 일치하지 않는다. 그리하여 농연기구에서는 육종학(育種學), 유전자 공학, 식물생리학을 바탕으로 착과높이와 과실의 숙성방법을 균일화하기 위한 연구를 수행하고 있다. 과방 수확로봇은 뒤에서 논할 선택 수확로봇보다 구조가 단순하며 저비용의 부품으로 제작되고 있다. 향후 산업분야의 기술 진전에 따라 로봇의 부품이 더욱 저렴해지면 저코스트의 로봇이 실현될 것으로 기대되고 있다. 도입 시 이용환경이 다습한 하우스 내이기 때문에 내환경성 및 내구성이 뛰어난 부품개발이 요망된다.
토마토 선택 수확로봇
구조
농연기구는 과방 수확로봇의 개발 전에 선택수확에 대응한 로봇을 먼저 개발했다. 개발 시 작업자와 같은 판단·동작을 행하는 수확로봇의 개발을 목표로 했다. 선택 수확로봇의 기본구성은 과방 수확로봇과 동일하며, ▲시각시스템 ▲매니퓰레이터 ▲엔드 이펙터 ▲주행부(走行部)로 구성된다([그림 5] 참조).
 시각시스템으로는 조명을 조사하여 생긴 과실표면 중앙부의 경면반사(鏡面反射)를 화상처리로 검출하는 스테레오 비전 시스템을 개발했다. 과실끼리 밀착되어 있는 과방 상태에서도 과실을 개별적으로 분리하여 3차원 위치를 검출할 수 있다. 과실의 경면반사를 검출할 뿐만 아니라, 엔드 이펙터의 접근방향을 판정하는 화상처리 프로그램도 개발했다. 시각시스템으로는 조명을 조사하여 생긴 과실표면 중앙부의 경면반사(鏡面反射)를 화상처리로 검출하는 스테레오 비전 시스템을 개발했다. 과실끼리 밀착되어 있는 과방 상태에서도 과실을 개별적으로 분리하여 3차원 위치를 검출할 수 있다. 과실의 경면반사를 검출할 뿐만 아니라, 엔드 이펙터의 접근방향을 판정하는 화상처리 프로그램도 개발했다.매니퓰레이터에는 6축 다관절형 산업용 로봇을 채용했다. 엔드 이펙터는 판스프링제의 4지(指) 파지 집게가 개폐하는 방식을 취했다([그림 6] 참조). 수확을 위한 접근 시 집게가 미숙과실에 접촉하지 않는 방향으로 엔드 이펙터를 접근시켜 과실을 파지하는데 이때 엔드 이펙터를 회전시켜 과실을 비틀어 딴다. 판스프링의 휨에 의해 과실의 크기가 달라도 과실 지름을 검출하지 않고 확실하게 파지할 수 있다. 또 엔드 이펙터에는 접촉센서가 구비되어 있어 집게가 과실에 접촉하면 접근동작을 멈춘다. 이 접촉센서를 통해 검출시스템에서 과실을 정밀하게 검출하지 않고도 확실하게 과실을 파지할 수 있다. 주행부는 파이프를 레일로 하여 주행하는 방식이다. 네덜란드의 시설에서는 파이프 안에 보일러로 데운 온수를 흘려 난방을 실시하고 있으며, 그 파이프를 고소작업차 등의 궤도로 이용하고 있다. 본 로봇의 주행방식도 파이프를 레일로써 이용하는 방식을 취했다. 또 화상처리 프로그램에 동영상 처리 기능을 추가했으며, 착색과실이 없는 토마토 그루의 앞은 주행을 계속하고 착색과실을 검출하면 주행을 멈춘다.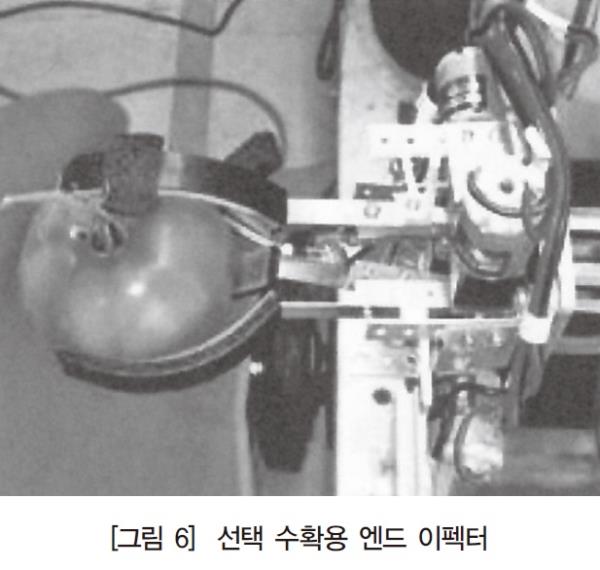 성능 성능
주행 및 수확을 실시한 하우스 내의 수확실험 결과, 과방 내의 과실 수가 1~4개일 때 과실을 검출하여 파지 가능했던 개수의 비율인 파지 성공률은 81~95%였다. 과실을 과경에서 분리하여 컨테이너에 수용 가능했던 개수의 비율인 수확 성공률은 44~90%였다. 꼭지가 달린 상태에서 과실의 상품가치를 훼손하지 않고 수확 가능했던 비율은 29~65%였다. 능률과 관련해 과실 1개당 수확에 소요되는 시간은 평균 27.6s/개였다.
향후 과제와 산업분야에 대한 기대
이 로봇은 일반적으로 행해지고 있는 수확방법에 적응되어 있기 때문에 생산자가 원하는 유형의 수확로봇이다. 그러나 능률·정밀도 모두 작업자보다 떨어지기 때문에 과방 중 수확적기인 과실의 위치를 검출하는 화상처리·센싱기술, 꼭지가 달린 상태에서 확실하게 수확할 수 있는 기계제어기술 등 고도의 센싱 및 제어기술을 이용한 수확로봇의 개발이 앞으로 기대되고 있다. 착과처리 로봇구조
착과처리는 확실하게 과실을 착과시키기 위한 중요한 작업이며, 분무기로 꽃 하나하나에 호르몬제를 분무하는 작업이다. 이 작업의 생력화를 위해 착과처리 로봇을 개발했다. 착과처리 로봇은 ▲시각시스템 ▲매니퓰레이터 ▲엔드 이펙터 ▲주행부로 구성된다([그림 7] 참조).
 앞서 설명한 과방 수확로봇과 매니퓰레이터, 주행부를 공통부품으로 이용 가능하도록 개발을 진행했다.시각시스템은 컬러카메라를 좌우로 이동시킴으로써 스테레오 화상을 얻어 3차원 위치를 계측한다. 로봇은 야간동작을 하는 것을 전제로 하고 있으며, 태양광에 의한 영향을 배제하고 있다. 토마토의 꽃은 노란색이며, 색상이 배경과 크게 다르기 때문에 색상에 의해 배경과 분리하는 프로그램을 개발했다. 앞서 설명한 과방 수확로봇과 매니퓰레이터, 주행부를 공통부품으로 이용 가능하도록 개발을 진행했다.시각시스템은 컬러카메라를 좌우로 이동시킴으로써 스테레오 화상을 얻어 3차원 위치를 계측한다. 로봇은 야간동작을 하는 것을 전제로 하고 있으며, 태양광에 의한 영향을 배제하고 있다. 토마토의 꽃은 노란색이며, 색상이 배경과 크게 다르기 때문에 색상에 의해 배경과 분리하는 프로그램을 개발했다.
매니퓰레이터는 전동 실린더로 구성되는 직교 3축 매니퓰레이터이며, 착과 호르몬제를 분무하기 위한 엔드 이펙터가 장착되어 있다. 엔드 이펙터는 전자밸브에 의해 자동으로 분무를 반복한다. 주행부는 과방 수확로봇과 마찬가지로 자기테이프 유도 방식의 산업용 반송로봇을 이용하고 있다.
성능
토마토는 개화시기가 고르지 않기 때문에 같은 하우스에서 분무시기를 2회로 나눠 자동분무실험을 실시했다. 자동주행 및 자동분무실험을 실시한 결과, 1회째의 주행에서는 꽃송이의 약 80%, 2회째의 주행에서는 나머지 20%의 꽃송이에 자동분무처리를 실시할 수 있었다. 이동을 포함한 1차 착과처리 시간은 한 그루당 22초, 이동과 미처리 꽃송이에 대한 2차 착과처리 시간은 한 그루당 8초였다. 로봇과 수작업에 의한 착과율은 양쪽 모두 평균 85%로 비슷한 정도였다.
향후 과제와 산업분야에 대한 기대
수확로봇과 마찬가지로 수작업보다 능률이 떨어지기 때문에 능률 향상이 중요한 과제가 된다. 야간뿐만 아니라, 주간에도 동작할 수 있게 만든다면 가동시간이 길어져 로봇을 유효하게 이용할 수 있다. 태양광의 영향을 받는 광환경에서도 꽃송이를 인식할 수 있는 센싱기술의 개발이 요망되고 있다.
<Energy News>
http://www.energy.co.kr
|
