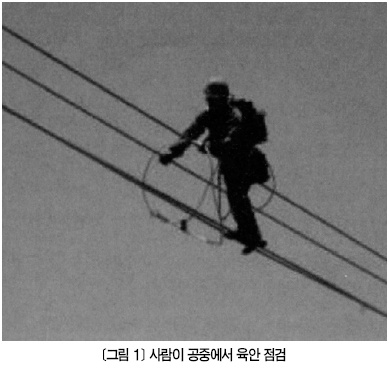
РќЗТШИЛчРЧ АЁАј МлРќМБ МБЗЮ БцРЬ(БрРхацэў)ДТ МіУЕ~МіИИЇАПЁ РЬИЅДй. РЬЗЏЧб МлРќМБРК СЄБтРћРИЗЮ СЁАЫРЬ РЬЗяСіИч, МлРќРЛ СЄСіЧб ЛѓХТПЁМ РлОїПјРЬ РќМБ РЇИІ РЬЕПЧЯИщМ РАОШ СЁАЫЧЯДТ ЙцЙ§РЬ РЯЙнРћРЬДй(<БзИВ 1> ТќСЖ). БзЗЏГЊ АјБо НХЗкЕЕ УјИщПЁМ МлРќМБ СЄСі НУБтПЁ СІОрРЬ РжДй КИДЯ СЁАЫ НУБтАЁ С§СпЕЧАэ, АэЗЩШПЁ СЂОюЕч РлОїПјРЬ ИЙОЦ ЧтШФ РЮРч ШЎКИПЁ ОюЗСПђРЬ РжДТ ЕюРЧ АњСІАЁ РжДй. РЬ ЖЇЙЎПЁ ДмЕЕУМ АЁАј МлРќМБРЛ ДыЛѓРИЗЮ Чб КёЕ№ПР СЁАЫ РхФЁИІ АњАХПЁ АГЙпЧпОњДй.
БзЗЏГЊ УЪАэОа ДйЕЕУМ МлРќМБПЁМДТ НКЦфРЬМ Ею КЮМгЧАРЛ ЧЧЧи СжЧрЧЯДТ ЕПРлРЬ ЧЪПфЧЯБтПЁ СЁАЫРхФЁИІ АГЙпЧЯДТ ЕЅ ГАќРЬ ЕЦДй. РЬЙјПЁ РЬЗЏЧб ЕПРлБтДЩ(ОжХЉЗЏЙюAcrobatРЬЖѓАэ Чд)РЛ АЎУпАэ РкРВ СжЧрЕЕ АЁДЩЧбЕЅДй 500ЇЧМлРќМБПЁМЕЕ МлРќЛѓХТПЁМ ДйЕЕУМ МлРќМБРЛ СЁАЫЧЯДТ РхФЁ(РЬЧЯ, 'СЁАЫЗЮКП')ИІ АГЙпЧпДй.
 АГЙпЧб СЁАЫ ЗЮКПРЧ БИСЖПЭ ЦЏТЁ АГЙпЧб СЁАЫ ЗЮКПРЧ БИСЖПЭ ЦЏТЁ
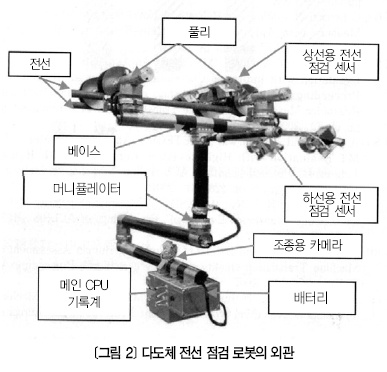
СЁАЫ ЗЮКПРЧ БИСЖ | АГЙпЧб СЁАЫ ЗЮКП ПмАќРК <БзИВ 2>ПЭ ААДй. УЪАэОа(500ЇЧ МГАш) ДйЕЕУМ РќМБ(1ЛѓДч РќМБ МіДТ 2, 4Сй Ею КЙМіммтІ РќМБРИЗЮ БИМК)ПыРИЗЮ АГЙпЧпРИИч, РќМБПЁ ИХДоИА ЛѓХТПЁМ ЕПРл, СжЧрЧЯДТ ЙцНФРЬДй.
ЗЮКПРК СжЧрПы ЙйФћРЮ 'ЧЎИЎ', ЧЎИЎПЭ ОЦЗЁТЪРЛ ПЌАсЧЯДТ 'КЃРЬНК', ЙшХЭИЎПЭ CPU ЙкНКИІ УбФЊЧб 'ФЋПюХЭПўРЬЦЎ', ФЋПюХЭПўРЬЦЎ РЇФЁИІ СЖСЄЧЯДТ 'ИгДЯЧНЗЙРЬХЭ'ЗЮ АЂАЂ БИМКЕШДй. ЖЧЧб, СЁАЫПы ФЋИоЖѓПЭ ЗЙРЬРњ МОМИІ ГЛРхЧб 'РќМБ СЁАЫ МОМ'ДТ РќМБПЁ МГФЁПЭ КаИЎАЁ РкРЏЗгДй. ДйЕЕУМ Сп РМБ 2СйПЁ ЧЎИЎАЁ АЩИЎИч, РкУМ ЙЋАд(РќУМ Ор 80ЇИ)ИІ СіСіЧЯДТ ЕПНУПЁ ЧЎИЎПЁ ГЛРхЧб БИЕП И№ХЭРЧ ХфХЉЗЮ СжЧрЧбДй. ИгДЯЧНЗЙРЬХЭРЧ Оч ГЁПЁЕЕ БИЕП И№ХЭИІ ХОРчЧи ИгДЯЧНЗЙРЬХЭИІ РкРЏЗгАд ШИРќНУХВДй.
 РхЧиЙА ПьШИ ЕПРл | ДйЕЕУМ МлРќМБПЁМ СжЧр РхЧиЙАРК РќМБ АЃАнРЛ РЏСіЧЯДТ НКЦфРЬМ, ЧіМі ОжРк РхФЁ ЕюРЬДй. СЁАЫ ЗЮКПРК РЬЗЏЧб РхЧиЙАРЛ ЧЧЧи СжЧр АЁДЩЧб ЕПРл БтДЩРЛ УЗАЁЧб АЭРЬ ХЋ ЦЏТЁРЬДй. РхЧиЙА ПьШИ ЕПРл | ДйЕЕУМ МлРќМБПЁМ СжЧр РхЧиЙАРК РќМБ АЃАнРЛ РЏСіЧЯДТ НКЦфРЬМ, ЧіМі ОжРк РхФЁ ЕюРЬДй. СЁАЫ ЗЮКПРК РЬЗЏЧб РхЧиЙАРЛ ЧЧЧи СжЧр АЁДЩЧб ЕПРл БтДЩРЛ УЗАЁЧб АЭРЬ ХЋ ЦЏТЁРЬДй.
РЬ ЕПРлРИЗЮ ИЧ ОЦЗЁТЪПЁ РжДТ ФЋПюХЭПўРЬЦЎ РЇФЁИІ СЖСЄЧдРИЗЮНс ЗЮКПРЧ СпНЩ РЇФЁИІ РЬЕПНУХААэ ЗЮКП РќУМРЧ БтПяБтИІ ЙйВу Чб ТЪ ЧЎИЎИІ РќМБПЁМ ЖчПя Мі РжДй. РЬЗИАд ЧиМ ЧіМі ОжРк РхФЁ Ею РќЙцРхЧиЙАРЛ ЧЧЧи СжЧрЧЯИч, ПЌМг РќМБ СЁАЫРЬ АЁДЩЧиСГДй.
ПьШИ ЕПРл МјМИІ ЛѓММШї МГИэЧЯИщ ДйРНАњ ААДй.
Јч ФЋПюХЭПўРЬЦЎИІ ШФЙцРИЗЮ РЬЕПНУХАИщ СпНЩРЬ ЕкЦэПЁ С§СпЕХ РќЙц ЧЎИЎАЁ РќМБПЁМ ЖпАд ЕШДй.
Јш РќЙц ЧЎИЎИІ 90°ШИРќЧб ШФ РќСјНУФб РхЧиЙАРЛ ХыАњНУХВДй.
Јщ РќЙц ЧЎИЎИІ ШИРќЧи РќМБ РЇФЁЗЮ ЕЧЕЙИЎАэ ФЋПюХЭПўРЬЦЎИІ СпОгБюСі РЬЕПНУФб РќМБПЁ НЦДТДй.
Јъ ШФЙц ЧЎИЎЕЕ СпНЩРЛ РќЙцРИЗЮ РЬЕПНУФб ЕПРЯЧб МјМЗЮ ЧрЧбДй.
ЖЧЧб, РЬ ЕПРлРК РќМБРЬ БтПяОюСј ЛѓХТПЁМЕЕ АЁДЩЧиОп ЧЯБтПЁ <БзИВ 3>Ањ ААРЬ РќМБРЛ 30°ЗЮ БтПяРЮ И№РЧ МБЗЮПЁМ ЕПРлРЛ ШЎРЮЧпДй.
АГЙп ИёЧЅ | СЁАЫ ЗЮКПРЧ АГЙп ИёЧЅДТ ЛчГЛофвЎАЁАј МлРќ МГКёРЧ НЧХТ ЕюРЛ АэЗСЧи <ЧЅ 1>Ањ ААРЬ МГСЄЧи АГЙпПЁ ИєЕЮЧпДй. ЖЧЧб, НЧСІ БдИ№ПЭ ЕПРЯЧб НУЧшПы МлРќМБРЬГЊ НЧСІ МлРќМБРЛ ЛчПыЧи НЧСѕ НУЧшРЛ ЧпРИИч, АГЙп ИёЧЅ РЬЛѓРЧ МКДЩРЛ ШЎРЮЧпДй.
АГЙп ИёЧЅ АЁПюЕЅ ЗЮКПРЧ СжЧр МгЕЕДТ ЧіРч РлОїПјРЬ АјСпПЁМ РАОШ СЁАЫЧЯДТ АЭАњ ЕПЕю РЬЛѓРЧ СЁАЫ МгЕЕИІ ИёЧЅЗЮ ЧпДй. ЖЧЧб ПјАн СЖРлЁЄПјАн АЈНУИІ РЇЧб ЙЋМБ БГНХ АХИЎДТ УЖХОРЧ АцАЃ АХИЎ СЄЕЕИщ НЧСІ РлОїПЁМ УцКаШї ШАПы АЁДЩЧв АЭРИЗЮ ЦЧДмЧи Ор 450mИІ ИёЧЅЗЮ ЧпРИГЊ, НЧСѕ НУЧшПЁМ 2ЙшПЁ АЁБюПю АХИЎПЁМ ЙЋМБ БГНХРЬ РЬЗяСГДй.
 НЧЕх ДыУЅ | МлРќ ЛѓХТРЮ РќМБ РЇПЁМ СЁАЫ ЗЮКПРЬ МлРќМБПЁ СїСЂ СЂУЫЧб ЛѓХТЗЮ СжЧрЧи ФЋИоЖѓ УдПЕРЛ ЧиОп ЧЯЙЧЗЮ НЧЕх ДыУЅРЛ ММПќДй. БИУМРћРИЗЮ ЗЮКППЁ АэРќОаРЬ АЩЗСЕЕ СЄЛѓ ЕПРлЧЯЕЕЗЯ CPUПЭ ЙшМБЗљИІ БнМгЙкРИЗЮ НЧЕхЧЯАэ ЦФРЬЧСПЭ ЙкНКПЁ ГЛРхЧпДй. РЬЗЮНс ЗЮКПРК ЧзЛѓ МлРќ РќОаАњ ААРК РќРЇЛѓХТАЁ ЕЧИч, РЬЛѓ ЙцРќРЛ ЙцСіЧЯДТ ЕПНУПЁ БнМгЙкРЧ ТїЦѓ НЧЕх ШПАњЗЮ ФкЗЮГЊ ГыРЬСюАЁ ГЛКЮЗЮ ЦлСіДТ АЭРЛ ИЗДТДй. АњРќ НУЧш, ДыРќЗљ НУЧшРЛ ХыЧи МКДЩРЛ ЦђАЁЧпРИИч, ЙЎСІ ОјРНРЛ ШЎРЮЧпДй. НЧЕх ДыУЅ | МлРќ ЛѓХТРЮ РќМБ РЇПЁМ СЁАЫ ЗЮКПРЬ МлРќМБПЁ СїСЂ СЂУЫЧб ЛѓХТЗЮ СжЧрЧи ФЋИоЖѓ УдПЕРЛ ЧиОп ЧЯЙЧЗЮ НЧЕх ДыУЅРЛ ММПќДй. БИУМРћРИЗЮ ЗЮКППЁ АэРќОаРЬ АЩЗСЕЕ СЄЛѓ ЕПРлЧЯЕЕЗЯ CPUПЭ ЙшМБЗљИІ БнМгЙкРИЗЮ НЧЕхЧЯАэ ЦФРЬЧСПЭ ЙкНКПЁ ГЛРхЧпДй. РЬЗЮНс ЗЮКПРК ЧзЛѓ МлРќ РќОаАњ ААРК РќРЇЛѓХТАЁ ЕЧИч, РЬЛѓ ЙцРќРЛ ЙцСіЧЯДТ ЕПНУПЁ БнМгЙкРЧ ТїЦѓ НЧЕх ШПАњЗЮ ФкЗЮГЊ ГыРЬСюАЁ ГЛКЮЗЮ ЦлСіДТ АЭРЛ ИЗДТДй. АњРќ НУЧш, ДыРќЗљ НУЧшРЛ ХыЧи МКДЩРЛ ЦђАЁЧпРИИч, ЙЎСІ ОјРНРЛ ШЎРЮЧпДй.
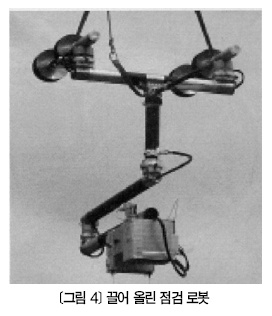
СЁАЫ ЗЮКП СЖИГ | ЛъАЃ СіПЊ ПюЙнРЛ АэЗСЧи ЗЮКПРК АЂ КЮЧАРИЗЮ КаЧиЕХ РжРИИч, УЖХО КЮСіПЁМ СЖИГЧЯАэ ЛѓХТ ШЎРЮ ШФ УЖХО ЛѓКЮЗЮ ВјОю ПУИАДй(<БзИВ 4> ТќСЖ). АЂ КЮКаРЧ ПЌАсЁЄСЖИГРК ННЖѓРЬЕх ЙцНФПЁ ЕћЖѓ ЧЯИч, ЙшМБ СЂМгРК ФПГиХЭИІ РЬПыЧи АЃДмШї КаЧиЁЄСЖИГЧЯАдВћ ЧпДй.
 СЁАЫ ЗЮКП СЖСО | СЁАЫ ЗЮКП СЖСОРК РлОїПјРЬ СіЛѓПЁМ ПјАн СЖРлРИЗЮ ЧбДй. СЖСОПы ФЋИоЖѓ ПЕЛѓРЛ СіЛѓРИЗЮ НЧНУАЃ РќМлЧЯБтПЁ ИжИЎ ЖГОюСј РЇФЁПЁМЕЕ ПЕЛѓРЛ КИИщМ ЗЮКПРЧ РкММГЊ СжЧр РЇФЁИІ АЈНУЧв Мі РжДй. ЖЧЧб, СЁАЫ ЗЮКПРЧ ОЦЗЁ КЮКаПЁ МГФЁЧб ЙпБЄДйРЬПРЕхРЧ ЙпБЄ ЛѓХТЗЮ РќПј ЛѓХТПЭ ЙЋМБ БГНХЛѓШВРЛ ШЎРЮЧбДй. АдДйАЁ РкРВРћРЮ ЕПРлРК ЙАЗа, НКРЇФЁ СЖРл ЧЯГЊЗЮ ДйОчЧб ЕПРл ИэЗЩРЛ ГЛИЎДТ АЭЕЕ АЁДЩЧЯДй. ЧбЦэ, ЙЋМБ ЙцНФРИЗЮ ПјАн СЖРлЧЯДТ АњСЄПЁМ ПЙБтФЁ ИјЧб ЛчХТЗЮ ЙпЛ§Чв Мі РжДТ ЙЋМБ АэРхРЛ АэЗСЧи ЙЋМБ НУНКХлРЛ РЬСпШЧЯАэ ПЙКё БтБтЕЕ КИРЏЧпДй. СЁАЫ ЗЮКП СЖСО | СЁАЫ ЗЮКП СЖСОРК РлОїПјРЬ СіЛѓПЁМ ПјАн СЖРлРИЗЮ ЧбДй. СЖСОПы ФЋИоЖѓ ПЕЛѓРЛ СіЛѓРИЗЮ НЧНУАЃ РќМлЧЯБтПЁ ИжИЎ ЖГОюСј РЇФЁПЁМЕЕ ПЕЛѓРЛ КИИщМ ЗЮКПРЧ РкММГЊ СжЧр РЇФЁИІ АЈНУЧв Мі РжДй. ЖЧЧб, СЁАЫ ЗЮКПРЧ ОЦЗЁ КЮКаПЁ МГФЁЧб ЙпБЄДйРЬПРЕхРЧ ЙпБЄ ЛѓХТЗЮ РќПј ЛѓХТПЭ ЙЋМБ БГНХЛѓШВРЛ ШЎРЮЧбДй. АдДйАЁ РкРВРћРЮ ЕПРлРК ЙАЗа, НКРЇФЁ СЖРл ЧЯГЊЗЮ ДйОчЧб ЕПРл ИэЗЩРЛ ГЛИЎДТ АЭЕЕ АЁДЩЧЯДй. ЧбЦэ, ЙЋМБ ЙцНФРИЗЮ ПјАн СЖРлЧЯДТ АњСЄПЁМ ПЙБтФЁ ИјЧб ЛчХТЗЮ ЙпЛ§Чв Мі РжДТ ЙЋМБ АэРхРЛ АэЗСЧи ЙЋМБ НУНКХлРЛ РЬСпШЧЯАэ ПЙКё БтБтЕЕ КИРЏЧпДй.
УдПЕЧб ПЕЛѓРК СЁАЫ ЗЮКП ОЦЗЁТЪ БтЗЯАш(Recorder)ПЁ КИСИЧЯДТ ЙцНФРЛ ХУЧпРИГЊ, ОеРИЗЮ СіЛѓПЁ МлНХЧЯИщМ СжЧрЧЯДТ АЭЕЕ АЫХфЧи ГЊАЅПЙСЄРЬДй.
РќМБ СЁАЫ БтДЩ | РќМБ СЁАЫ МОМПЁ РќМБ ПмАќРЛ УдПЕЧЯДТ ФЋИоЖѓПЭ РќМБ ЙйБљСіИЇРЛ УјСЄЧЯДТ ЗЙРЬРњМОМИІ ХОРчЧпДй. СЖСОПы ФЋИоЖѓИІ АцАЃ НКЦфРЬМ ПмАќ УдПЕПЁЕЕ РЬПыЧи НКЦфРЬМ РќАцРЬГЊ РќМБ ЦФСіКЮїъђЅнЛИІ ЛѓММШї СЁАЫЧбДй. <БзИВ 5>ДТ ФЋИоЖѓЗЮ УдПЕЧб РќМБ ЧЅИщ ШЛѓРЛ, <БзИВ 6>РК СЖСОПы ФЋИоЖѓЗЮ СмZoomРЛ Чб ПмАЃ НКЦфРЬМ РќУМ ШЛѓРЛ, <БзИВ 7>РК АцАЃ НКЦфРЬМ ЦФСіКЮРЧ ШЎДы ШЛѓРЛ РЯЗЪЗЮ ГЊХИГН АЭРЬДй. РќМБРЧ МвМБ ЛѓХТ, НКЦфРЬМ ЦФСіКЮРЧ ЛѓХТ ЕюРЛ МБИэЧб ШЛѓРИЗЮ ШЎРЮ АЁДЩЧЯБтПЁ РЬЛѓ РЏЙЋИІ ЦЧСЄЧв Мі РжДй.
ЧбЦэ, РќМБ ЧЅИщРЧ РЬЛѓ РЏЙЋ ЦЧСЄПЁДТ ШЛѓ УГИЎНУНКХлРЛ РћПыЧи ПьМБ НУНКХлРИЗЮ РкЕП ЦЧСЄНУХВ ШФ УжСО ШЎРЮРК ЛчЖїРЬ ЧЯЕЕЗЯ ЧпДй.
СЁАЫ ЗЮКПРЧ НЧСѕ НУЧш ЛѓШВ
СЁАЫ ЗЮКПРЧ АГЙп АЂ ДмАшПЁМ НЧСІ БдИ№ПЭ ЕПРЯЧб НУЧшПы МлРќМБРЬГЊ НЧСІ МлРќМБРЛ ЛчПыЧи НЧСѕНЧЧшРЛ ЧЯАэ МКДЩРЛ ЦђАЁЧпДй. АњРќ ЛѓХТПЁМРЧ ЕПРл ШЎРЮРК РЯКЛ РќЗТСпОгПЌБИМвРЧ НУПРЙйЖѓ[塩ъЋ] НУЧшМБРЛ ЛчПыЧи НЧСІ БдИ№РЧ МлРќМБ СжЧр НУЧшРЛЧпДй(<БзИВ 8> ТќСЖ). НУЧшМБРЧ РќОаРЛ 500kV ЛѓДчБюСі АњРќЧи АЂ КЮКаРЧ ЕПРл ЛѓШВРЛ ШЎРЮЧпРИИч, АэРќОаРИЗЮ ИЛЙЬОЯРК ПЕЧтЕЕ ОјРЬ ЗЮКПРК ИХ Ка УжДы 28m МгЕЕЗЮ СжЧрЧпДй. РЬДТ СЖРлПјРЬ АјСпПЁМ РАОШ СЁАЫЧЯДТ АЭАњ ЕПЕю РЬЛѓРЧ МгЕЕДй. ЖЧЧб, РќМБ СЁАЫ МОМРЧ УдПЕ СЄЙаЕЕЕЕ ОчШЃЧпРИИч, CCD ФЋИоЖѓЗЮ РќМБ ЙйБљТЪ ЕбЗЙИІ МБИэЧЯАд УдПЕЧи РќМБПЁ РжДТ ОЦСж РлРК ШчРћБюСі АЫУтЧпДй. ЗЙРЬРњ МОМЗЮДТ 0.1ЇЎ ДмРЇРЧ РќМБ ЙйБљСіИЇ КЏШИІ АЫУтЧпДй.
  ДйРН ДмАшЗЮ ЧіМі ОжРк РхФЁИІ ПьШИЧЯДТ ЕПРлРЛ АЫСѕЧб АсАњ, Ор 5Ка ИИПЁ КА ОюЗСПђ ОјРЬ НЧЧіЧпДй. ДйРН ДмАшЗЮ ЧіМі ОжРк РхФЁИІ ПьШИЧЯДТ ЕПРлРЛ АЫСѕЧб АсАњ, Ор 5Ка ИИПЁ КА ОюЗСПђ ОјРЬ НЧЧіЧпДй.
РЬЗЏЧб ЕПРлРК ИХДКОѓ СЖСОРЬ ОЦДб ЙнРкЕПРИЗЮ СЖСОЧв Мі РжЕЕЗЯ ЧСЗЮБзЗЅРЛ СІОюЧи СЖСОРкРЧ КЮДуРЛ ГЗУшДй. РЬЙЬ МГИэЧб ДыЗЮ ЙЋМБ ХыНХ АХИЎДТ 740mБюСі ШЎРЮЧпРИИч, ЛъАЃ СіПЊ Ею РќИСРЬ ГЊЛл АцАЃПЁМЕЕ СЖСОРкРЧ РЬЕП КЮДуРЛ СйРЬАэ ФЋИоЖѓПЕЛѓРЛ КИИщМ СЖСОЧЯДТ АЭРЬ АЁДЩЧЯДй. ЧбЦэ, РЬПЭ ААРК НЧСѕ НУЧшРК РќМБ ЧЅИщРЧ ПЕЛѓ ЕЅРЬХЭ МіС§, РлОїМК ШЎРЮ ЕюРЛ АтЧи, НУЧшРЛ НЧНУЧЯДТ МлРќМБРЛ ЙйВуАЁИч НЧНУЧпДй.
СЁАЫ ЗЮКПРЛ МлРќ ЛѓХТРЧ РќМБПЁ МГФЁЧЯДТ АјЙ§СЁАЫ ЗЮКПРЛ 500kV МлРќ ЛѓХТ РќМБПЁ ОШРќЧЯИщМ ШПРВРћРИЗЮ МГФЁЧЯБт РЇЧи ДйРН Р§ТїИІ ЕћЖњДй.
Јч FRP(МЖРЏ АШ ЧУЖѓНКЦН), БИИЎ АќРИЗЮ БИМКЧб РхУДэўєЉРЧ Р§ПЌКРРЛ СиКёЧи ХО РЇПЁБюСі ВјОю ПУИАДй.
Јш ВјОю ПУИА Р§ПЌКРРЛ ХО КЛУМ ТЪПЁМ РќМБ ТЪРИЗЮ ГбОюЖпЗС УЖХОАњ РќМБ ЛчРЬПЁ ДйИЎИІ ГѕДТДй.
Јщ ЗЮКПРЛ Р§ПЌКРПЁ МГФЁЧи Р§ПЌКР РЇИІ ЕћЖѓ СжЧрЧЯИщМ РќМБ КЮБйБюСі РЬЕПЧбДй.
Јъ ФЋПюХЭПўРЬЦЎ ЕюРИЗЮ СпНЩ РЬЕПЧЯИщМ Р§ПЌКРПЁМ РќМБРИЗЮ ПХАм ХКДй.
 НЧСІ УЖХОПЁМ АЫСѕЧб АсАњ, Р§ПЌКР СЖИГПЁМ РќМБ МГФЁБюСі АјСЄРК ОШРќМКРЛ ШЎКИЧЯДТ ЕПНУПЁ УцКаШї НЧПыМКРЬ РжДТ АЭРИЗЮ ШЎРЮЧпДй. Р§ПЌКРПЁМ РќМБРИЗЮ ПХАм ХТПьДТ АњСЄПЁДТ Р§ПЌКР ГЁБюСі ЧбТЪ ЙйФћЗЮ СжЧрЧи РЬЕПЧб Ек РхЧиЙА ПьШИ ЕПРлРЛ РРПыЧб ДіКаПЁ РќМББюСі РЬЕПРЬ АЁДЩЧпДй. ЧбЦэ, УпЖєЙцСіПы ШЃХЉДТ Р§ПЌКР РЇИІ СжЧрЧЯДТ СпПЁЕЕ СІ БтДЩРЛ ЧЯЕЕЗЯ АэОШЧпДй. РЬЛѓРЧ МКАњИІ ЙйХСРИЗЮ РЬЙјПЁ АГЙпЧб АјЙ§РЛ ЧіРхПЁМ ШАПыЧЯЕЕЗЯ БтКЛ РлОї МјМИІ ЧЅСиШЧпДй. НЧСІ УЖХОПЁМ АЫСѕЧб АсАњ, Р§ПЌКР СЖИГПЁМ РќМБ МГФЁБюСі АјСЄРК ОШРќМКРЛ ШЎКИЧЯДТ ЕПНУПЁ УцКаШї НЧПыМКРЬ РжДТ АЭРИЗЮ ШЎРЮЧпДй. Р§ПЌКРПЁМ РќМБРИЗЮ ПХАм ХТПьДТ АњСЄПЁДТ Р§ПЌКР ГЁБюСі ЧбТЪ ЙйФћЗЮ СжЧрЧи РЬЕПЧб Ек РхЧиЙА ПьШИ ЕПРлРЛ РРПыЧб ДіКаПЁ РќМББюСі РЬЕПРЬ АЁДЩЧпДй. ЧбЦэ, УпЖєЙцСіПы ШЃХЉДТ Р§ПЌКР РЇИІ СжЧрЧЯДТ СпПЁЕЕ СІ БтДЩРЛ ЧЯЕЕЗЯ АэОШЧпДй. РЬЛѓРЧ МКАњИІ ЙйХСРИЗЮ РЬЙјПЁ АГЙпЧб АјЙ§РЛ ЧіРхПЁМ ШАПыЧЯЕЕЗЯ БтКЛ РлОї МјМИІ ЧЅСиШЧпДй.
СЁАЫ ЗЮКП ЕПРл НУ ЛѓХТ АЈНУ
СжЧр НУ БеЧќ СІОюДТ АќР§КЮРЧ АЂЕЕ МОМ, CPUРЧ РкММ МОМЗЮ ЧзЛѓ ОШСЄЕШ БеЧќРЛ РкЕПРИЗЮ РЏСіЧбДй(<ЧЅ 2> ТќСЖ). РЬ ЛѓХТДТ СЁАЫ ЗЮКПРЧ ПјАн СЖСО НУПЁЕЕ СжКЏ ФФЧЛХЭ ШИщРИЗЮ ЗЮКПРЧ РкММ ЛѓХТИІ ШЎРЮЧв Мі РжДй. ОЦПяЗЏ ЗЮКП АЂ КЮКаРЧ АЁП РЏЙЋ, РќЗљ ХыРќ ЛѓШВ, ЙшХЭИЎ ЛѓХТ, УпЖє ЙцСіПы ШЃХЉ ЛѓХТ ЕюРЛ ФФЧЛХЭ ШИщРИЗЮ ШЎРЮ АЁДЩЧЯДй.
*
РЬРќКЮХЭ ДйЕЕУМ МлРќМБРЧ КЮМгЧАРЛ ПьШИЧи СжЧрЧЯДТ БтДЩРЛ АЫХфЧпРИГЊ СЛУГЗГ НЧЧіРЬ ОюЗСПќДй.
РЬЙјПЁ АГЙпЧб ЗЮКПРК РЬЗЏЧб ЕПРлРЛ НЧЧіЧб ЕЅ РЬОю МлРќ ЛѓХТПЁМЕЕ РќМБ ЧЅИщ СЁАЫРЬ АЁДЩЧЯДй. РЬЗЏЧб СЁАЫ Хј АГЙпПЁ ИёЧЅИІ ММПќДј АЭРК ОеРИЗЮРЧ ПфБИПЁ ИТУч ДйОчЧб РРПы АЁДЩМКРЬ РжРИИч, РЬЗЮНс ДѕПэ Дѕ ЙпРќЧв АЭРИЗЮ ЦЧДмЧпБт ЖЇЙЎРЬДй. ЖЧЧб, ХОРчЧб МОМРЧ ЕЅРЬХЭИІ ПЌМгЧи МіС§Чв Мі РжОю ЛѕЗЮПю СЁАЫ БтМњ АГЙпРЛ АэОШЧв АЁДЩМКЕЕ РжДй.
СЄИЎ РќШПЕ БтРк
<Energy News>
http://www.energy.co.kr
|
